1. URDF이란?
URDF(Unified Robot Description Format)는 로봇의 원, 타원, 직사각형 따위의 기하학적 모델, 관절, 센서 등의 정보를 정의하는 XML 형식의 파일이다. 이 XML 파일에서 로봇의 부분을 나타내는 링크(link)와 동적인 움직임을 갖는 조인트(joint) 등 정보를 정의해서 로봇을 모델링 한다. 모델링한 정보는 RViz(ROS Visualization), Gazebo와 같은 시각화 프로그램을 사용해서 로봇 모델을 확인하고 시뮬레이션 해볼 수 있다.
로봇의 모델링, 시뮬레이션 및 제어를 위해 URDF외에도 아래와 같이 여러 파일 형태가 존재한다.
- URDF: Unified Robot Description Format
- 주로 로봇의 모델링 및 시뮬레이션에 사용되고 RViz 도구에서 사용된다
- SDF: Simulation Description Format
SDF로봇 시뮬레이션에 사용되는 XML 형식의 파일로, Gazebo 와 같은 시뮬레이션 도구에서 사용된다- Gazebo 변환 명령어를 이용해서 URDF → SDF 변환도 가능하다
$ gz sdf -p model.urdf > model.sdf
- SRDF: Semantic Robot Description Format
URDF와 함께 사용되며, 로봇의 그룹, 경로 계획, 충돌 검사 등의 정보를 정의하는 XML 형식의 파일이고 MoveIt 에서 사용된다- Setup Assistant 프로그램을 통해 URDF → SRDF로 쉽게 변환 가능하다
2. 모델링 하려는 로봇 정보 - 매니플레이터
매니플레이터(manipulator)는 로봇의 한 유형으로 인간의 팔과 유사한 동작을 하는 로봇이다.
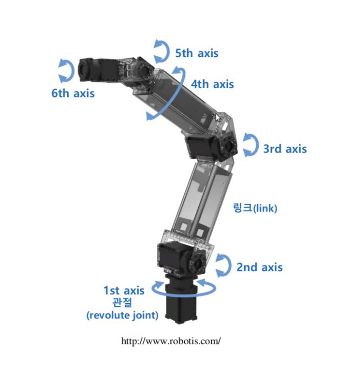
URDF 으로 모델링할 로봇은 매니플레이터이다. 매니플레이터의 기본 구조는 다음과 같이 기저, 링크, 조인트, 말단 장치로 구성되어 있다.
2.1 매니플레이터의 기본 구조
- 기저(base): 매니퓰레이터가 고정되어 있는 부분
- 목적에 따라 작업 공간내 바닥이 될 수 있음
- 동적으로 움직이는 모바일 로봇이 될 수도 있음
- 링크(link) : 기저, 조인트, 말단 장치를 연결해주는 강체 역할
- 쉽게 말해 프레임이라고 보면 됨
- 조인트(joint) : 로봇의 움직임을 만들어내는 부분
- 회전(revolute) 운동형과 병진(prismatic) 운동형 등의 동적 움직임을 가짐
- 말단 장치 (end effector) : 사람의 손에 해당하는 부분 또는 장비
- 집거나 흡착하여 들어올리거나 페인트를 분사하는 등 로봇의 목적에 따라 달라짐
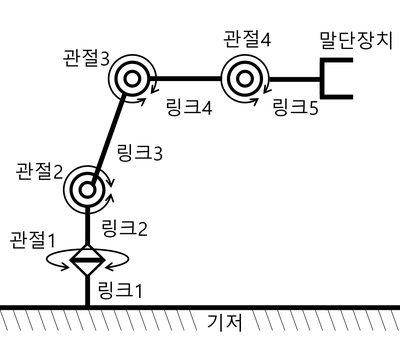
구성 요소에서 가장 중요한 부분은 링크와 조인트 부분이다.
- 링크
<link>= 링크의 이름, 외형, 무게(mass, kg), 관성 모멘트(Kg.m^2)- 외형: 원통, 원뿔, 직육면체등의 간단한 모델을 쓴다. 복잡한 구조는 메쉬 (mesh)을 표현하는
stl,dae(collda) 포맷을 사용한다
- 외형: 원통, 원뿔, 직육면체등의 간단한 모델을 쓴다. 복잡한 구조는 메쉬 (mesh)을 표현하는
- 조인트
<joint>= 조인트의 이름, 종류, 운동의 기준 축, 최소, 최대 조인트 값, 조인트에 부여되는 힘 / 속도- 조인트는 전/후 링크와의 관계를 기술한다
- 아래와 같이 여러 조인트 종류로 정의할 수 있다
3. Description 패키지 생성하기
위에서 언급한 매니플레이터의 기본 정보를 URDF로 작성해보자. ROS 커뮤니티에서는 로봇의 모델링 정보를 담은 패키지를 로봇명_description 라는 이름으로 주로 사용한다.
- ROS Index에서
description으로 검색하면 이미 작성된 여러 URDF을 예제로 확인해볼 수 있다
우리가 작성할 testbot_description패키지를 생성하자.
# 로봇의 모델링 정보을 받음 패키지 생성
$ cd ~/robot_ws/src
$ ros2 pkg create testbot_description --build-type ament_cmake --dependencies urdf
# urdf 폴더 생성후 urdf 파일 생성
$ cd testbot_description
$ mkdir urdf
$ cd urdf
$ vim testbot.urdf
3.1 전체 URDF 예시
<?xml version="1.0" ?>
<robot name="testbot">
<material name="green">
<color rgba="0 0.6 0 1" />
</material>
<material name="orange">
<color rgba="1.0 0.4 0.0 1.0"/>
</material>
<link name="base"/>
<link name="link1">
<inertial>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<mass value="1.0"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="green"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
</link>
<link name="link2">
<inertial>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<mass value="1.0"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="orange"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
</link>
<link name="link3">
<inertial>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<mass value="1.0"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 1.0"/>
</geometry>
<material name="green"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 1.0"/>
</geometry>
</collision>
</link>
<link name="link4">
<inertial>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<mass value="1.0"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
<visual>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="orange"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
</link>
<joint name="base_joint" type="fixed">
<parent link="base"/>
<child link="link1"/>
</joint>
<joint name="link1_link2" type="revolute">
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<parent link="link1"/>
<child link="link2"/>
<axis xyz="0.0 0.0 1.0"/>
<limit lower="-2.617" upper="2.617" effort="30.0" velocity="1.571"/>
</joint>
<joint name="link2_link3" type="revolute">
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<parent link="link2"/>
<child link="link3"/>
<axis xyz="0.0 1.0 0.0"/>
<limit lower="-2.617" upper="2.617" effort="30.0" velocity="1.571"/>
</joint>
<joint name="link3_link4" type="revolute">
<origin xyz="0.0 0.0 1.0" rpy="0.0 0.0 0.0"/>
<parent link="link3"/>
<child link="link4"/>
<axis xyz="0.0 1.0 0.0"/>
<limit lower="-2.617" upper="2.617" effort="30.0" velocity="1.571"/>
</joint>
</robot>
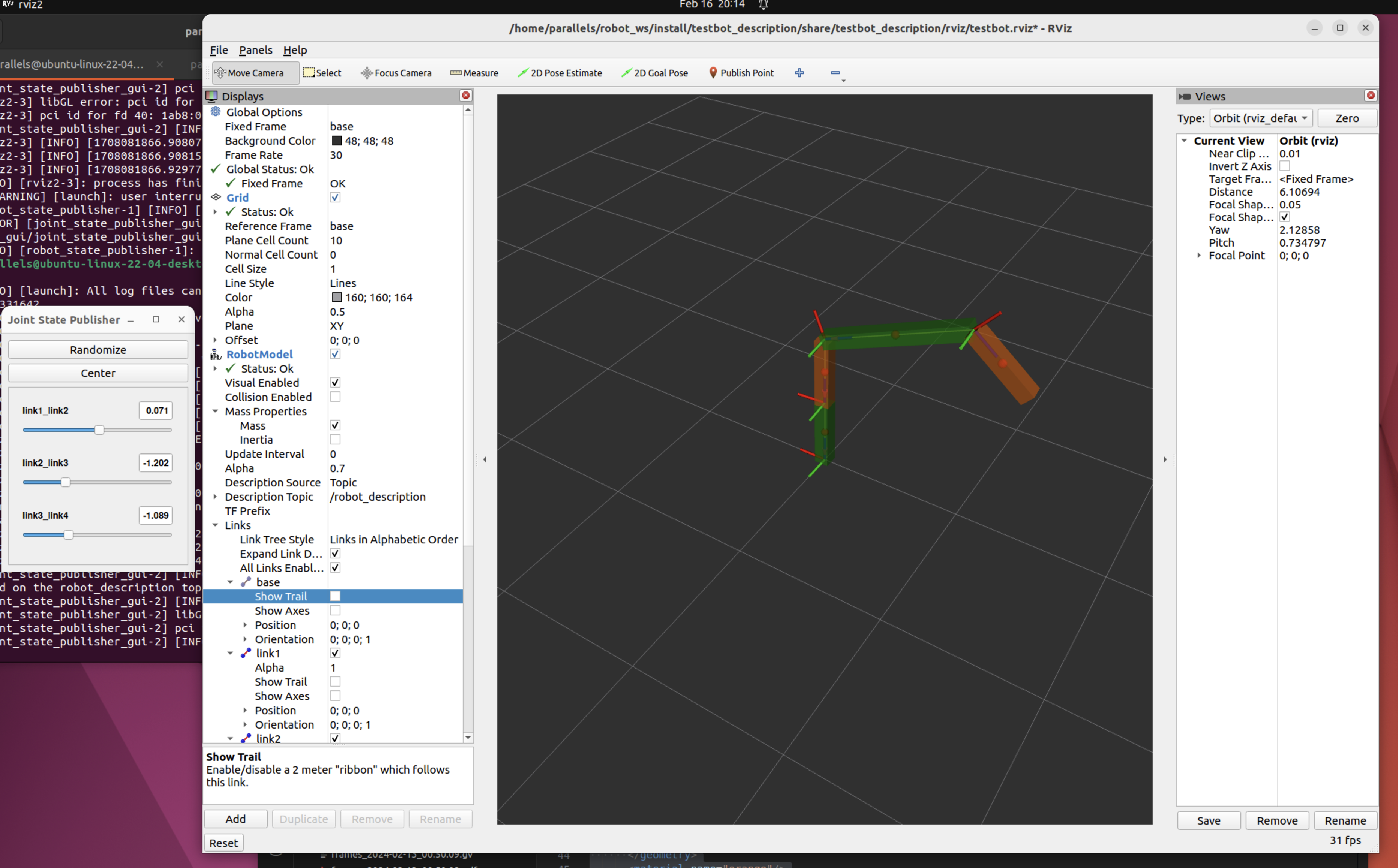
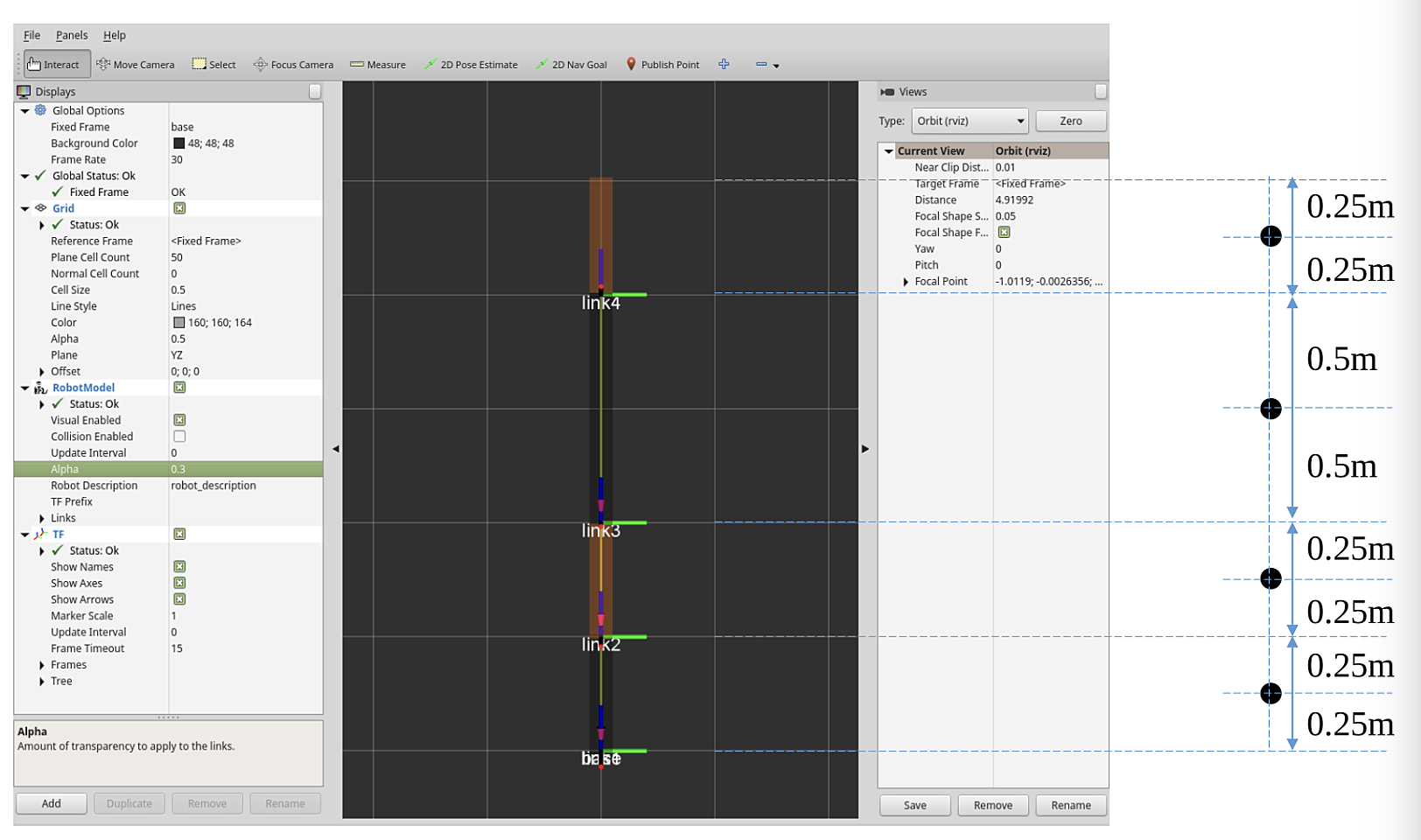
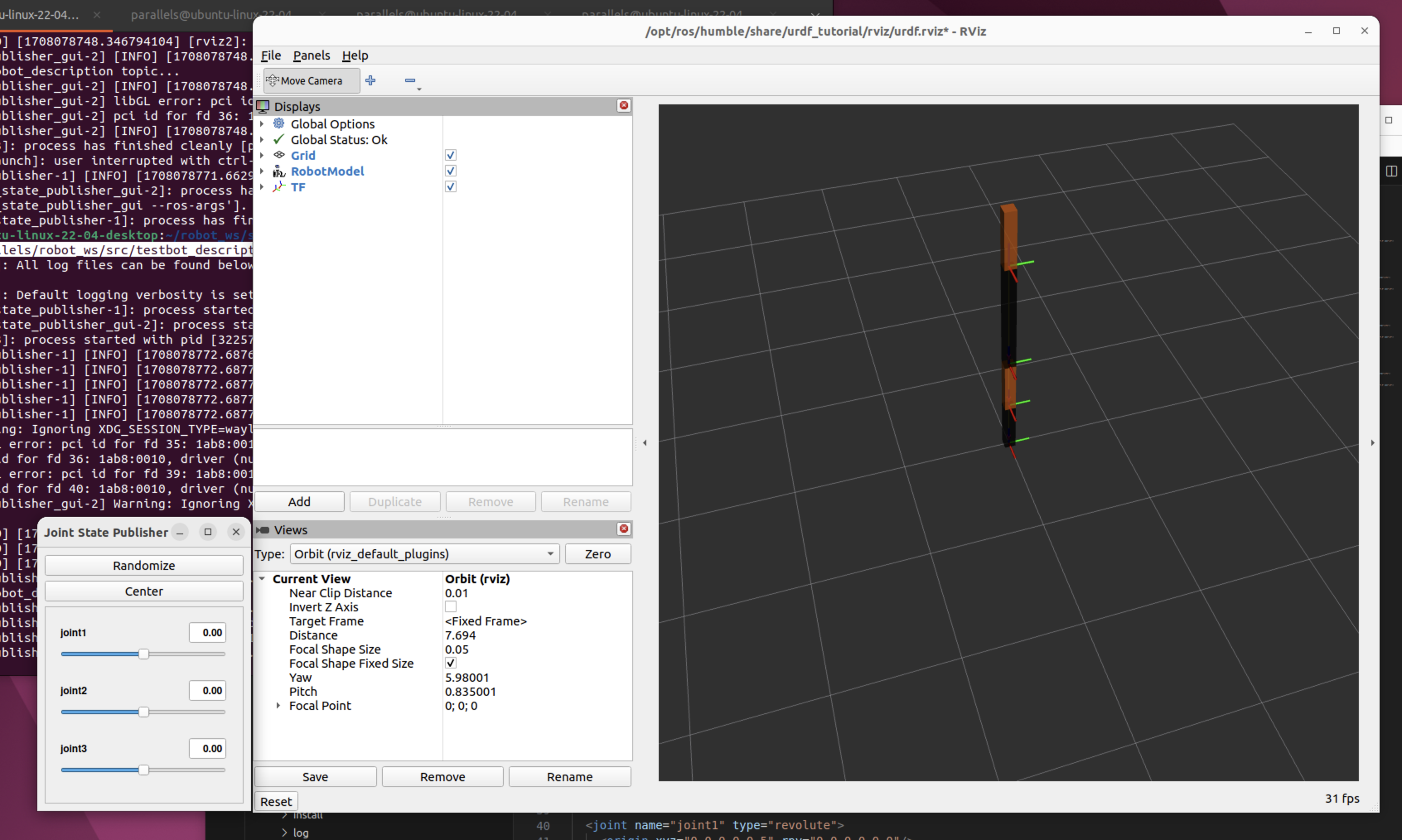
3.2 RViz에서 렌더링된 화면
4. URDF 작성하기
URDF는 로봇을 설명하기 위한 XML 명세서로 XML 태그를 이용해서 로봇의 각 구성 요소를 기술한다. 이 명세서는 최대한 일반적으로 명시하도록 최대한 설계 되어 있지만, 이 명세서로는 모든 로봇을 설명할 수는 없다. 주요 제약 사항은 트리 구조만 표시할 수 있으며 병렬적으로 동작하는 로봇은 모델이 어렵다. 그리고 로봇이 조인트는 단단한 링크로 구성되어 있다고 가정하며 유연한 요소는 지원하지 않는다.
URDF XML에 대한 스펙은 ROS 문서에서 확인 할 수 있다. https://wiki.ros.org/urdf/XML
4.1 <robot>
<robot> 태그는 로봇 설명 파일의 root 요소로 제일 먼저 선언이 되어야 한다. 로봇에 대한 설명은 링크 요소와 링크를 서로 연결하는 조인트 요소 집합으로 구성된다.
<?xml version="1.0" ?>
<robot name="testbot">
<link name="base"/>
<link name="link1"> ... </link>
<link name="link2"> ... </link>
<joint name="base_joint" type="fixed"> ... </joint>
<joint name="link1_link2" type="fixed"> ... </joint>
<joint name="link2_link3" type="fixed"> ... </joint>
</robot>
4.2 <link>
<link> 태그는 일반적으로 로봇의 각 파트 (ex. 본체, 팔, 다리, 휠 등)을 표현하는데 사용되고 각 링크는 조인트를 통해 다른 링크에 연결이 된다.
매니퓰레이터의 구성 요소 그 첫 번째인 기저는 URDF에서 링크로 표현한다. 기저는 첫번째 링크와 조인트로 연결되어 있으며 이 조인트는 fixed 타입으로 설정되어 움직이지 않게 고정되어 있고 원점(0.0,0.0,0.0)에 위치해 있다.
<link name="base">
<joint name="base_joint" type="fixed">
<parent link="base"/>
<child link="link1"/>
</joint>
<link name="link1">
<visual>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
<material name="green"/>
</visual>
<collision>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.1 0.1 0.5"/>
</geometry>
</collision>
<inertial>
<origin xyz="0.0 0.0 0.25" rpy="0.0 0.0 0.0"/>
<mass value="1.0"/>
<inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
</inertial>
</link>
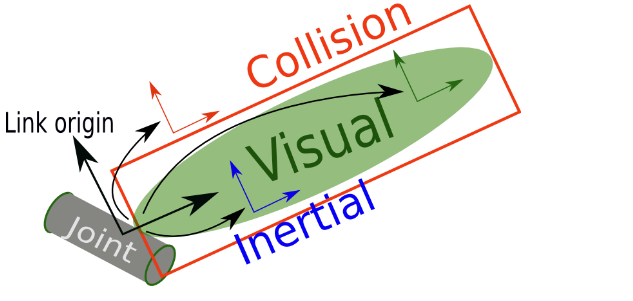
<link>는 시각화 <visual>, 충돌 <collision> , 관성<inertial>태그로 구성되어 있다.
-
common tag
<origin>- 원점 좌표- 좌표는
xyz좌표계를 통해 로봇의 위치를 3차원 공간 상에서 표현을 하고ryz오일러 각을 통해 로봇의 방향을 표현한다 - 단위는
xyz(meter),rpy(radian)을 사용한다
- 좌표는
-
<visual><geometry>태그는 origin 좌표 중심으로 표시 범위와 모양과 크기를 적는다- 모델의 모양 입력은 box, cylinder, sphere 형태를 기본으로 제공한다
- 표현하기 어려운 모델인 경우에는 STL, DAE등의 CAD 파일을 입력할 수도 있다
-
<collision><collision>태그에는 링크의 간섭 범위를 나타내는 정보를 입력을 한다<origin>와<geometry>태그는 위에서 언급한 내용과 동일한데 표시 범위가 아닌 간섭 범위로<visual>태그의 표시 범위보다 더 크게하여 안전을 더 고려할 수도 있다
-
<inertial>-
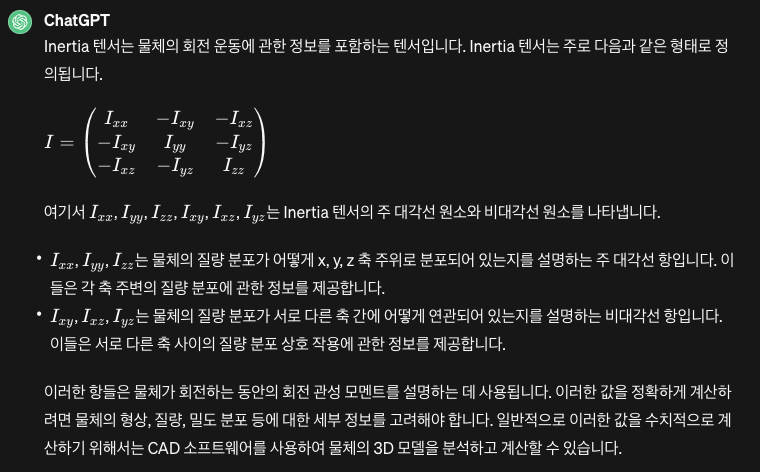
이 태그로 물리적 속성인 질량과 관성 텐서 (inertial tensor) 값을 지정한다
-
<mass>태그는 링크의 무게 (mass, 단위: kg) -
<inertia>태그는 관성 모멘트 (moments of inertia, 단위:kg·m^2)는 3x3 회전 관성 행렬로 정의를 한다. 대칭이라서 아래 밑줄친 것만 정의를 한다| ixx | ixy | ixz | | ---- | ---- | ---- | | ixy | iyy | iyz | | ixz | iyz | izz |
-
4.2.1 <material>
<material> 태그는 링크의 색상(color)이나 텍스처(texture)를 지정하는 데 사용된다.
<rgba>태그로 색상을 지정한다- 빨강, 초록, 파랑에 해당하는 0.0 ~ 1.0 사이의 숫자를 각각 기입하여 설정할 수 있다
- 마지막 숫자는 투명도(알파)로 0.0 ~ 1.0 값을 가지며 1.0 이면 투명 옵션을 사용하지 않은 고유 색상을 그대로 표시하는 상태를 의미한다
<texture>텍스쳐는 파일(ex.png)로 지정한다
<material name="green">
<color rgba="0 0.6 0 1" />
</material>
<material name="orange">
<color rgba="1.0 0.4 0.0 1.0"/>
</material>
4.3 <joint>
<joint> 태그는 로봇의 조인트를 정의하는 데 사용되고 각 조인트는 두 링크를 연결하며 어떤 방식으로 움직일 수 있는지 정의한다.
4.3.1 URDF 에서 지원하는 조인트 종류
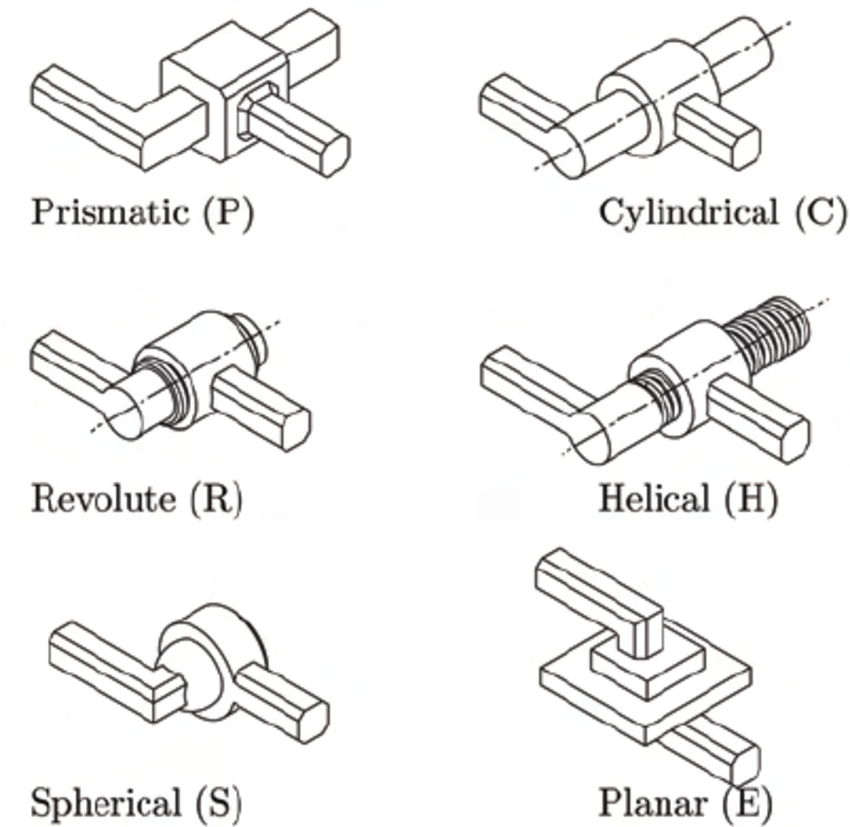
fixed(고정): 움직임이 허용되지 않는 관절이다revolute(회전): 선풍기의 좌우 회전과 같이 일정 각도 범위를 회전하는 관절이다continuous(연속): 자동차 바퀴처럼 연속 회전을 하는 관절이다prismatic(프리즘): 단일 축에 대해 선형으로 미끄러지는 관절로 최대, 최소 위치 제한을 가진다floating(자유): 6차원 이동 및 회전을 허용하는 관절이다planar(평면): 한 평면에 수직으로 이동 및 회전할 수 있는 관절이다
<joint name="link1_link2" type="revolute">
<origin xyz="0.0 0.0 0.5" rpy="0.0 0.0 0.0"/>
<parent link="link1"/>
<child link="link2"/>
<axis xyz="0 0 1"/>
<limit lower="-2.617" upper="2.617" effort="30.0" velocity="1.571"/>
</joint>
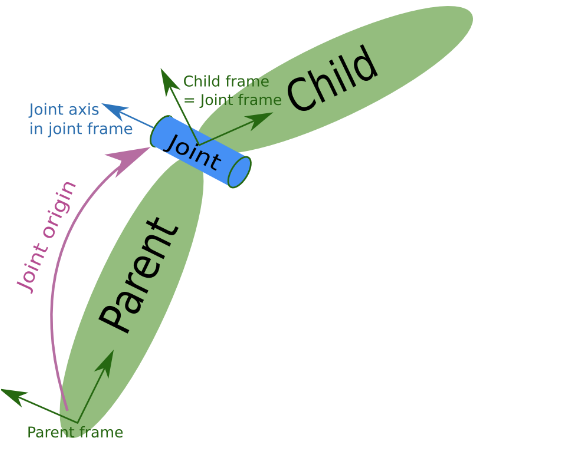
<parent>,<child>- 연결하는 링크로는 부모 링크(parent link)와 자식 링크(child link)의 이름을 지정하는데 일반적으로 기저에 가까운 링크를 부모 링크라고 보면 된다
<axis>- 회전 축을 정의한다. 축은 로봇의 기준 좌표를 기준으로 정의되며, 회전 운동의 방향을 결정한다.
<axis xyz="0 0 1"/>x, y는 zero 값으로 설정하고 z 값만 설정을 해서link1와link2조인트의 경우에는 선풍기 목부분 z 축 기준으로 회전을 하는 설정이다
- 회전 축을 정의한다. 축은 로봇의 기준 좌표를 기준으로 정의되며, 회전 운동의 방향을 결정한다.
<limit>- 조인트 동작에 대한 제한 사항을 설정한다.
- 속성은 최소, 최대 조인트 (lower, upper, 단위: radian), 조인트에 부여되는 힘(effort, 단위: N), 속도 (단위: rad/s)의 제한 값을 설정한다
- 2.617 radian는 약 150도이다
- 조인트 동작에 대한 제한 사항을 설정한다.
각 태그와 각 설정하는 값에 대해서 이해하려면 직접 값을 변경해가면서 RViz에서 어떻게 렌더링되고 로봇이 동작을 하는지 테스트를 해보면 URDF를 이해하는 데 도움이 된다
참고
- https://wiki.ros.org/urdf/XML/link
- Adding physical and collision properties
- https://duvallee.tistory.com/11
5. URDF 런치 파일 생성 및 실행
5.1 런치 파일 생성
check_urdf 나 urdf_to_graphiz 와 같은 명령어(참고: 8. URDF 파일 validation 체크)를 통해서 작성한 URDF 의 syntax나 렌더링 된 모습을 간단하게 확인할 수 있지만, 더 자세한 모델은 RViz에서 확인하는 게 제일 베스트이다. 이를 위하여 우선 다음 예제와 같이 testbot_description 패키지 폴더로 이동해 testbot.launch.py 파일을 생성해보자.
$ cd ~/robot_ws/src/testbot_description
$ mkdir launch
$ cd launch
$ vim testbot.launch.py
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
rviz_display_config_file = os.path.join(
get_package_share_directory('testbot_description'),
'rviz',
'testbot.rviz')
urdf_file = os.path.join(
get_package_share_directory('testbot_description'),
'urdf',
'testbot.urdf')
with open(urdf_file, 'r') as infp:
robot_description_file = infp.read()
ld = LaunchDescription()
robot_state_publisher = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
parameters=[
{'use_sim_time': False},
{'robot_description': robot_description_file}
],
output='screen')
joint_state_publisher_gui = Node(
package='joint_state_publisher_gui',
executable='joint_state_publisher_gui',
output='screen')
rviz2 = Node(
package='rviz2',
executable='rviz2',
arguments=['-d', rviz_display_config_file],
output='screen')
ld.add_action(robot_state_publisher)
ld.add_action(joint_state_publisher_gui)
ld.add_action(rviz2)
return ld
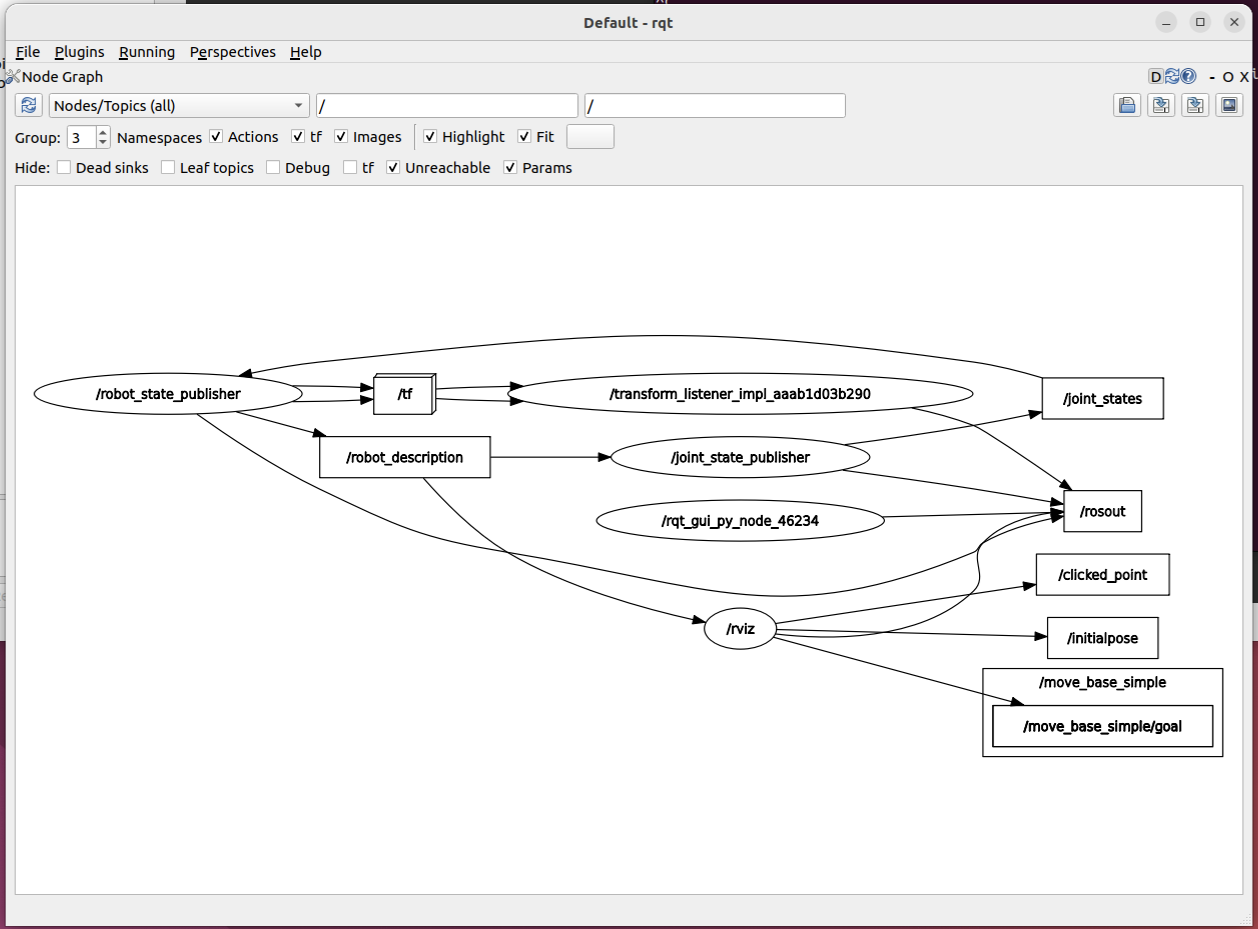
URDF를 담은 robot_description 파라미터와 joint_state_publisher, robot_state_publisher, rviz2 노드로 구성되어 있다.
joint_state_publisher노드- 파라미터 서버의
robot_description파라미터에 URDF가 주어지면 이 노드는 URDF의 모든 이동 가능한 관절에 대한 기본 값을/joint_states토픽에sensor_msgs/msg/JointState메시지 형태로 지속적으로 publish를 한다 - Published Topic
/joint_states(sensor_msgs/JointState) - 시스템에 있는 모든 움직이는 조인트 상태 값
-
조인트에 명령을 주는 GUI 툴을 제공한다 - - 파라미터 서버의
robot_state_publisher노드- URDF에 설정된 로봇 정보와
sensor_msgs/msg/JointState토픽 정보를 가지고 계산한 kinematic tree model (TF)와 3D 위치 정보를/tf,/tf_static토픽에 publish를 해주는 역할을 한다 - Published Topics
/robot_description(std_msgs/msg/String) - 로봇 URDF에 대한 String 값이다.robot_descriptionparameter에 값이 설정되면 이 토픽으로 republish 하여 동적인 정보도 전달될 수 있다/tf(tf2_msgs/msg/TFMessage) - 로봇의 움직일 수 있는 조인트에 대한 정보를 보낸다/tf_static(tf2_msgs/msg/TFMessage) - 로봇의 정적 조인트에 해당하는 정보를 보낸다
- Subscribed Topic
/joint_states(sendor_msgs/msg/JointState) - 로봇 위치에 대한 관절 상태가 업데이트된다
- URDF에 설정된 로봇 정보와
5.1.1 RQT
참고
- http://wiki.ros.org/robot_state_publisher
- https://github.com/ros/robot_state_publisher
- https://github.com/ros/joint_state_publisher/tree/noetic-devel/joint_state_publisher
5.2 빌드 및 실행
런치 파일 생성후 rviz 디스플레이 생성 파일을 생성하면 된다. 모든 파일은 github repo에 있어서 원본 파일을 참고하여 추가하자.
참고로 예제로 작성한 testbot_description 패키지는 하기와 같은 패키지를 의존하고 있기에 빌드 전에 설치해야 한다.
$ sudo apt install ros-humble-joint-state-publisher ros-humble-joint-state-publisher-gui ros-humble-robot-state-publisher
# 컴파일하고 런치 실행
$ cd ~/robot_ws/
$ colcon build --symlink-install
$ ros2 launch testbot_description testbot.launch.py
자주 사용하는 명령어는 alias로 생성해두면 ros 관련 명령어를 빠르게 실행할 수 있다.
alias cba='colcon build --symlink-install' alias cbp='colcon build --symlink-install --packages-select' alias cw='cd ~/robot_ws' alias sl='source $HOME/robot_ws/install/local_setup.bash'
5.2.1 런치 파일 없이 실행하는 방법
ros-humble-urdf-tutorial 이용하면 론치 파일 작성 없이 URDF를 RViz에서 로딩해볼 수 있다. ros-###-urdf-tutorial 패키지가 설치가 되있어야 한다.
# 설치
> sudo apt install ros-humble-urdf-tutorial
# 아래 명령어로 실행하면 된다
> ros2 launch urdf_tutorial [display.launch.py](<http://display.launch.py/>) model:=/home/parallels/robot_ws/src/testbot_description/urdf/testbot.urdf
런치 파일로 실행한 것과 같이 RVIz에서 렌더링 된 매니풀레이터를 볼 수 있다.
6. URDF 작성시 필요한 도구
6.1 URDF for VSCode
- URDF 지원
.urdf,.xacro파일 xml 형식 지원- 일부 snippet 지원
- Jetbrain PyCharm에서는 지원하는 plugin은 없는 듯함
참고
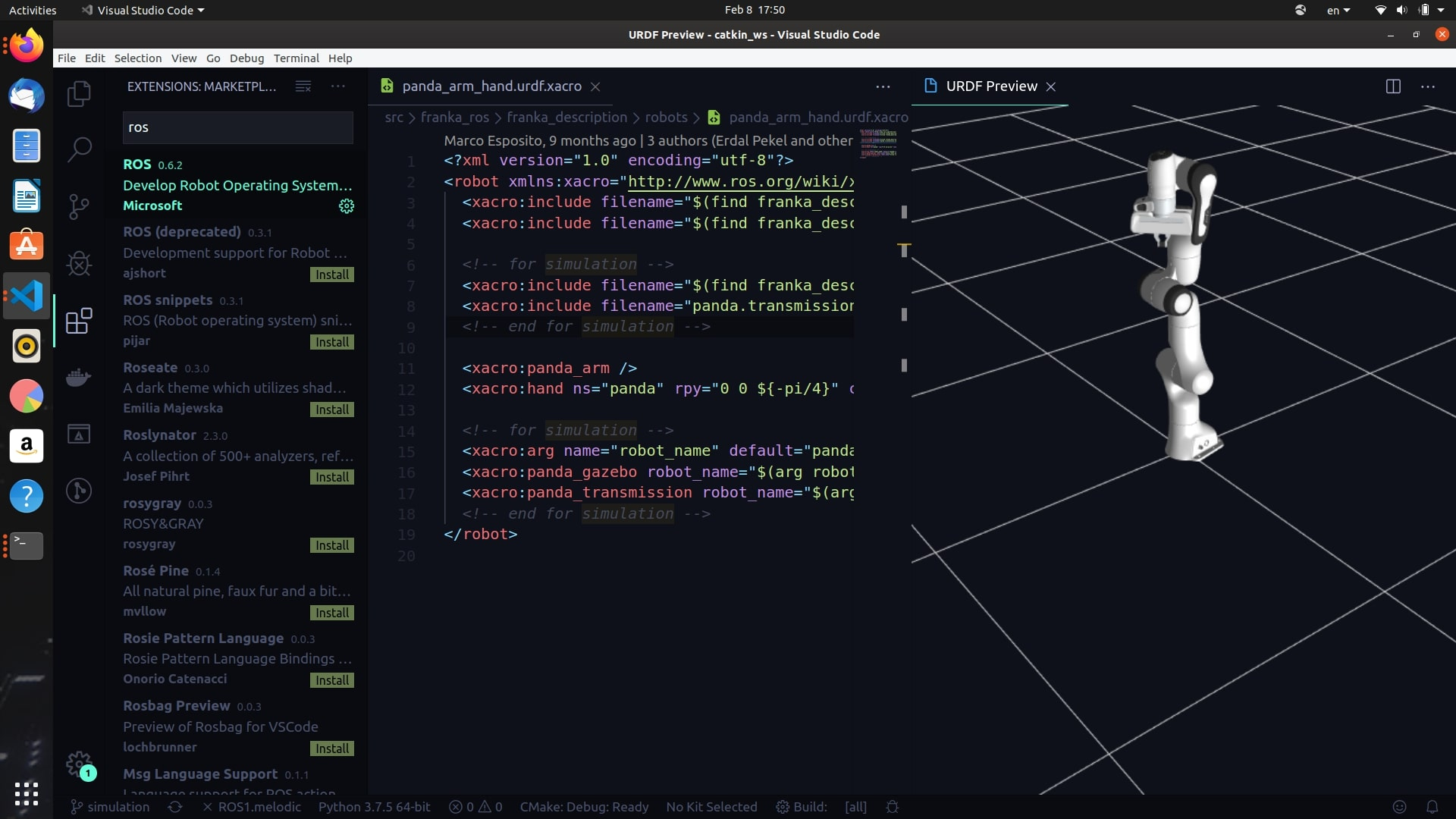
6.2 ROS: Preview UDF ← 이건 잘 안됨
- Marketplace > ROS extension 설치
- 사용방법 : urdf 파일 오픈 후
Command Palette>ROS: Preview URDF선택- ROS로는 되는대 ROS 2에서는 안되는게 아닌가 싶음
6.2.1 기대하는 화면 - 안됨
- 실행해보면 blank 화면이 나옴
참고
6.3 URDF 파일 validation 체크
URDF 으로 로봇 모델이 잘 작성이 되었는지 검토하는 방법은 여러 명령어로 확인이 가능하다.
6.3.1 check_urdf
ROS에서는 check_urdf 명령어로 작성한 URDF의 문법적 오류 및 각 링크의 연결 관계를 확인할 수 있다.
$ check_urdf testbot.urdf
robot name is: testbot
---------- Successfully Parsed XML ---------------
root Link: base has 1 child(ren)
child(1): link1
child(1): link2
child(1): link3
child(1): link4
6.3.2 urdf_to_graphiz
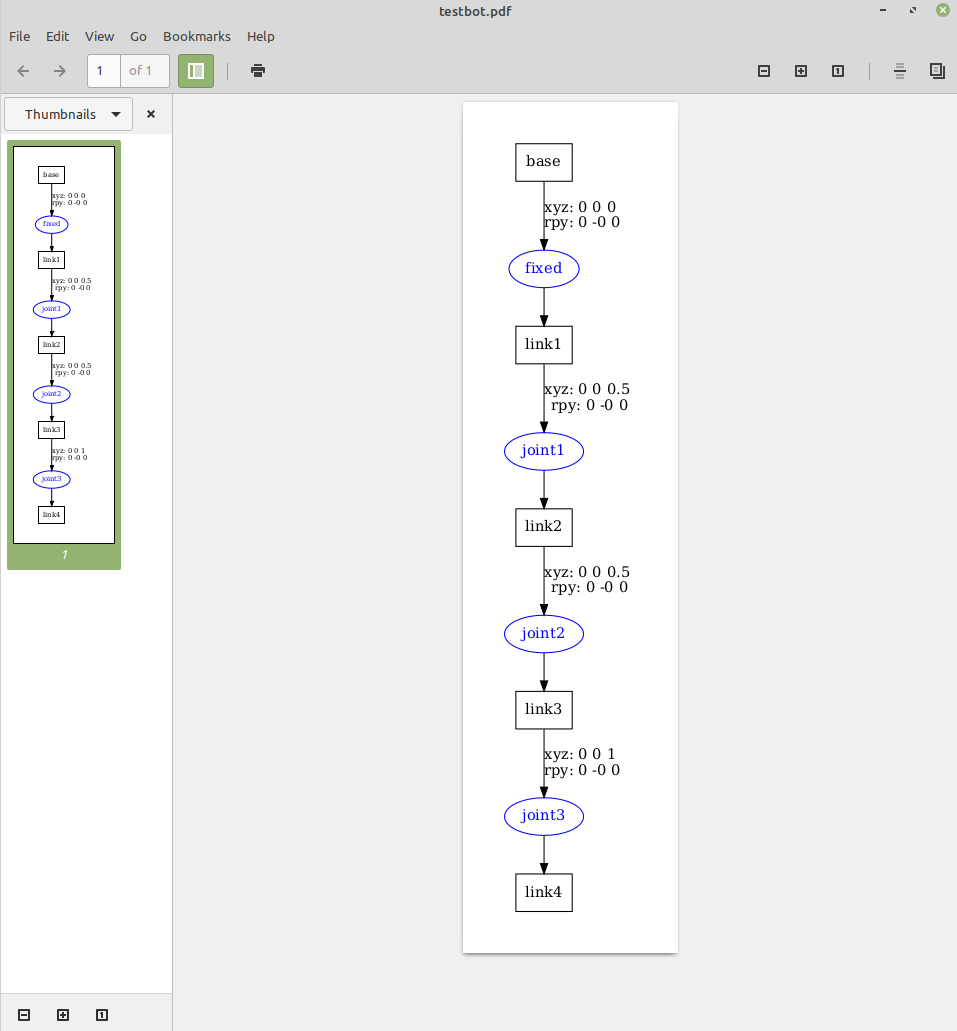
작성한 모델을 graphiz 다이어그램으로도 나타낼 수 있다. urdf_to_graphiz 명령어로 아래처럼 실행하면 .gv 파일과 .pdf 파일이 생성이 된다. 링크와 조인트와의 관계, 각 조인트와 조인트 사이의 상대 좌표 변환을 한눈에 확인해 볼 수 있다.
$ urdf_to_graphiz testbot.urdf
Created file testbot.gv
Created file testbot.pdf
6.3.2.1 URDF의 link와 joint의 관계
6.3.3 tf2_tools
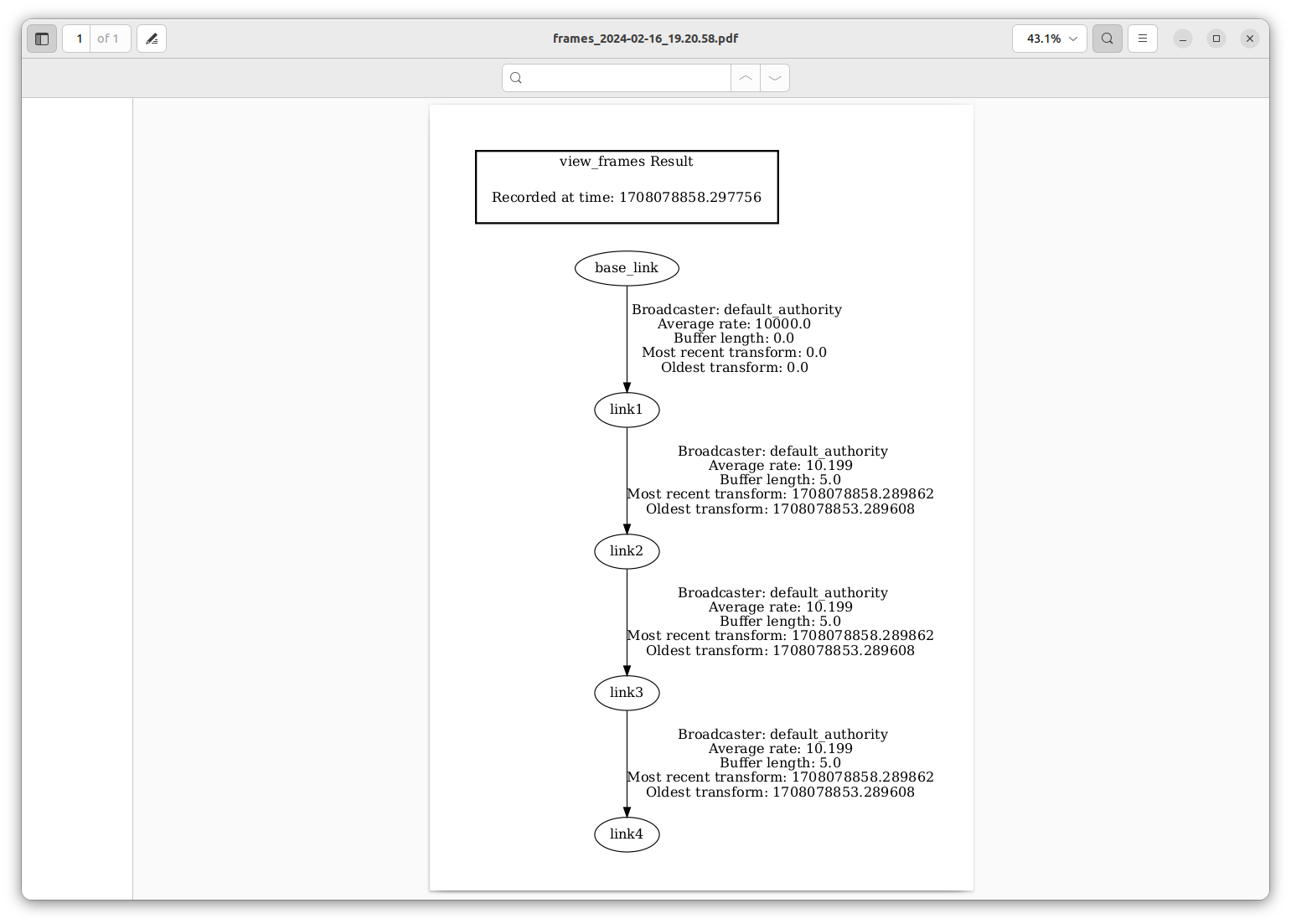
view_frames 은 현재 TF tree를 그래프로 PDF 생성해주는 그래픽 디버깅 도구이다.
$ ros2 run tf2_tools view_frames
$ evince frames_2024-02-16_19.20.58.pdf
참고
- http://wiki.ros.org/tf2_tools
- https://docs.ros.org/en/humble/Tutorials/Intermediate/Tf2/Introduction-To-Tf2.html#tf2-tools
6.4 RViz
RViz (ROS Visualization)는 ROS의 시각화 도구 중 하나로 로봇의 위치 및 자세, 센서 데이터, 지도 정보등을 시각화하여 사용자가 로봇 시스템을 이해하고 디버깅할 수 있게 해준다. RViz가 설치 안되어 있으면 아래 명령어로 설치하고 rivz2 로 실행하면 된다.
6.4.1 설치 및 실행
# 설치
> sudo apt install ros-humble-rviz2
# 실행
> rviz2
참고
7. FAQ
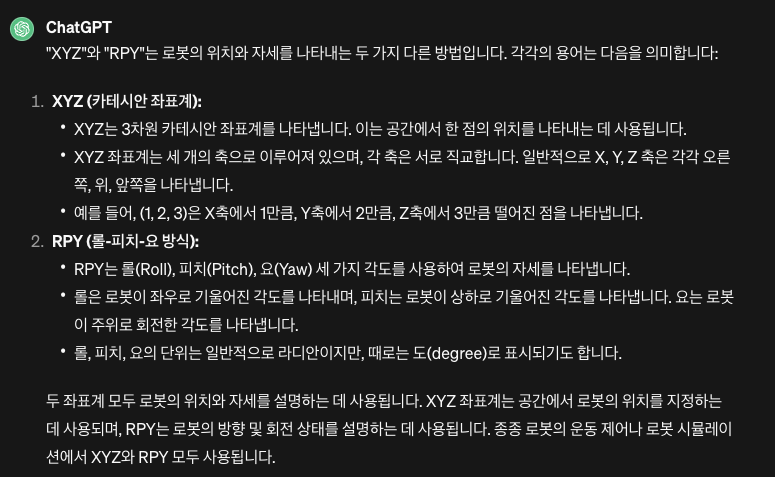
7.1 xyz, rpy의 차이점?
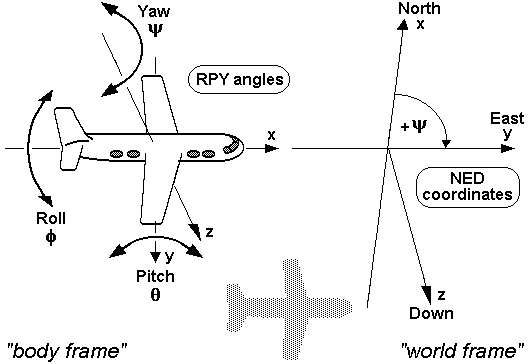
7.1.1 RPY angles
참고
- https://commons.wikimedia.org/wiki/RPY_angles
- https://www.youtube.com/watch?v=sFi6i8YzQVA
- https://www.youtube.com/watch?v=Hg3EGzB3oqQ
7.2 xacro이란?
xacro(자크로) 파일은XML Macro의 줄임말로 반복되는 코드를 불러올 수 있는 매크로 언어이다- URDF를 만드는데 XML로드 가능하지만,
xacro를 사용하여 재사용 가능한 부분을 정의해서 코드를 간결하게 유지하고 재사용성을 높일 수 있다
7.2.1 Xacro 기능
7.2.1.1 속성, 속성 블럭
<xacro:property name="the_radius" value="2.1" />
<xacro:property name="the_length" value="4.5" />
<geometry type="cylinder" radius="${the_radius}" length="${the_length}" />
7.2.1.2 수학 상수 및 함수 제공
- ex.
pi,sqrt(x),radians(x)
<xacro:property name="circle_revolute_upper" value="${pi/2}"/>
<xacro:property name="circle_revolute_upper" value="${radians(180)}"/>
<origin xyz="0.0 0.0 ${height/2+joint_height}" rpy="0.0 0.0 0.0"/>
7.2.1.3 조건부 블럭
- 조건부 블럭은 변수의 참(true, 1), 거짓(false, 0)에 따라서 다르게 정의를 할 수 있다
<xacro:property name="var" value="useit"/>
<xacro:if value="${var == 'useit'}">
<...some xml code here...>
</xacro:if>
<xacro:if value="${var.startswith('use') and var.endswith('it')}">
<...some xml code here...>
</xacro:if>
7.2.1.4 매크로
- 매크로는 인자(parameter)를 받을 수 있다
<xacro:macro name="link_box_macro" params="suffix">
<link name="link_${suffix}">
<xacro:insert_block name="link_inertial_box" />
<xacro:insert_block name="link_visual_box" />
<xacro:insert_block name="link_collision_box" />
</link>
</xacro:macro>
<xacro:link_box_macro suffix="1" />
참고
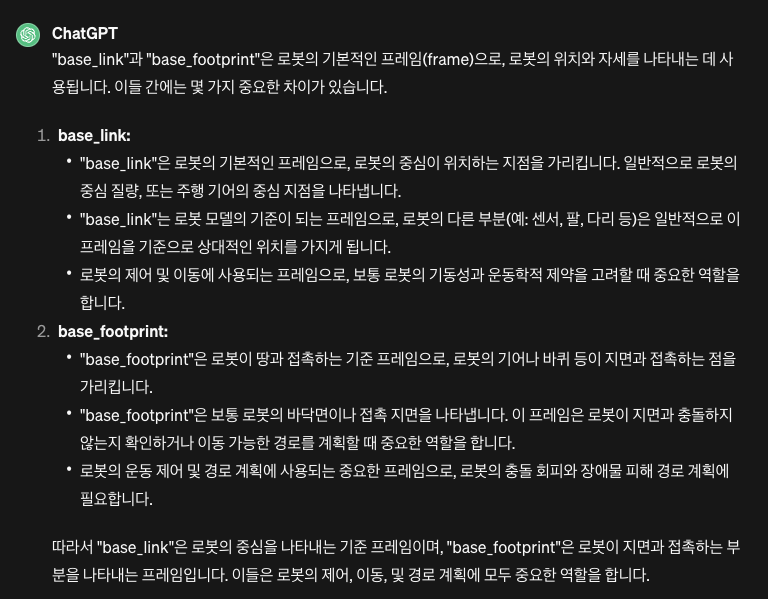
7.3 base_link, base_footprint의 차이점?
7.4 매니플레이터, manipulator
- 인간의 팔과 유사한 동작을 하는 로봇의 기구이다
- 보통 여러 개의 자유도를 가지며 대상물(부품 또는 공구)을 붙잡거나 옮길 목적으로, 서로 상대적인 회전 운동이나 미끄럼 운동을 하는 관절의 연결로 구성된 기구이다
참고
- https://terms.tta.or.kr/mobile/dictionaryView.do?subject=머니퓰레이터
- https://roomedia.tistory.com/entry/41일차-매니퓰레이션-소개-및-URDF-작성법
7.5 inertia를 정의할 때 ixx, ixy의 의미는 뭔가?
8. 다음 스터디 주제
- 로델링한 로봇 제어해보기
- gazebo 로 로봇 모델링
- navigation 관련 스터디
9. 참고
- ROS 2 강좌 by 표윤석
- [Building a Visual Robot Model with URDF from Scratch](http://wiki.ros.org/urdf/Tutorials/Building a Visual Robot Model with URDF from Scratch)
- http://wiki.ros.org/urdf#Verification
- ROS2의 로봇 모델용 URDF
- https://duvallee.tistory.com/11